1.0
System Overview ϵͳ����
1.1 System Description
 ϵͳ����
ϵͳ����
![]() PaR designed and developed the Vector2® Robot product
line for a cost effective high accuracy robot for smaller work envelopes in 5��
x 10�� x 1�� and 5�� x 12�� x 1��. The
Vector2® is provided with
3 axes of motion. The X and Y axes
are servo motor driven and controlled by our powerful CIMROC® PC based open architecture controller and the Z axis is electric
motor driven.
PaR designed and developed the Vector2® Robot product
line for a cost effective high accuracy robot for smaller work envelopes in 5��
x 10�� x 1�� and 5�� x 12�� x 1��. The
Vector2® is provided with
3 axes of motion. The X and Y axes
are servo motor driven and controlled by our powerful CIMROC® PC based open architecture controller and the Z axis is electric
motor driven.
PaRϵͳ��˾��ƿ�����Vector2® ��������������Ϊ�ͳɱ��߾��ȵĻ����ˣ����� 5�� x 10�� x 1����5�� x12�� x 1���ļӹ�����Vector2® �ṩ3���˶���X��Y �����ŷ�������������ɻ��ڿ���ʽ�ṹ�ĸ�ЧCIMROC® PC���������ƣ�Z���ɵ��������
PaR provides this robotic process cutting system as a turnkey project.
PaRϵͳ��˾���ṩ���ֻ������и�ϵͳ�Ľ�Կ����
Summary of Work Envelope
�ӹ��������
The following table displays the work envelope of the major axes.
�±�����Ҫ��ļӹ�����

1.2
Scope of Supply
������Χ
1.2.1
Summary of Equipment
�豸ժҪ
|
Item ��Ŀ |
Quantity ���� |
Description ���� |
|
1 |
1 |
VECTOR
2 Positioning System��λϵͳ |
|
2 |
1 |
CIMROC®5000NT CNC Controller������ |
|
3 |
1 |
I.R.
50 Hp Intensifier Pump��ѹ�� |
|
4 |
1 |
IR
High Pressure Delivery System��ѹˮ����ϵͳ |
1.2.2
Summary of Services Provided
�ṩ����ժҪ
System Documentation
ϵͳ����
Spare Parts
�㱸��
System Installation Services
ϵͳ��װ����
System Training
ϵͳ��ѵ
24Сʱ��������
2.0
Equipment Description �豸����
2.1
VECTOR2® Waterjet Cutting
System
VECTOR2® ˮ�и�ϵͳ
2.1.1
Description
����
 The Vector2® requires three phase 380-volts with
50 Hz and 150 amp service.
The Vector2® requires three phase 380-volts with
50 Hz and 150 amp service.
Vector2® ����ĵ�ԴΪ3��380��50����150��
2.1.2
Major Features
��Ҫ�ص�
The Vector2® has many features not found in other waterjet cutting systems including the following:
Vector2® ����������ˮ�и�� ��û�е��ص㣬�������£�
High capacity steel support structure and retractable cantilever arm allows for open access to the cutting area
��ǿ�ȸ�֧�Žṹ�Ϳ����ص����۽ṹ���������ɽӽ��ӹ�����
Heavy-duty, industrial grade machine designed to run multiple shifts
���͡���ҵ�� ����е��ƣ����������ӹ���
Ingersoll Rand 50 HP intensifier pump
��Ingersoll Rand�� 50ƥ������ѹ�á�
14�� by 15�� footprint
14��x15�����γߴ硣
No system homing yields higher throughput from reduced start-up and recovery time completely eliminating the potential for collisions during homing operation
ϵͳ���� ���㣬�����������ͻָ���ʱ�� ������˲�������ȫ������ �ڻ������ʱDZ�ڵ���ײ��
Precision ball screws allow for excellent accuracy
���ܹ���˿�ܣ��ṩ���ߵĶ�λ���ȡ�
Linear bearing rails for precision guidance
������е������ھ��ܵ���
Low maintenance lubrication intervals on bearing blocks
����л���ı�����ʱ ��������
Stainless steel magnetic covers on X and Y axes prevent contamination for both the racks and linear ways, Z axis is a self-contained, sealed unit
��X��Y���ϴ�������� ���Ի����Է�ֹ�ҳ����� ����� ���Ե����ڣ�Z�ᰲװ��һ�������� �������ܷ�װ�á�
All moving components (bearings, ball-screws, motors) have greater than a 20,000-hour life
���п��ƶ���������У�����˿�ܣ�����������г���20,000Сʱ��ʹ��������
Positive pressure on X, Y, and Z axes to eliminate contamination of linear ways and ball screws
��X��Y��Z��������ѹ����װ�ã����������Ե������˿���ϵ� �ҳ���
2.1.3
Components
����
The Vector2® System consists of the following major assemblies and subassemblies:
Vector2® ϵͳ������������Ҫ�ܳɺͲ��� ��
Support structure consisting of a welded base structure
֧�Žṹ�� һ�����ӵĻ������
Cantilever arm with dual ball screw drive system
���ۺ�˫����˿������ϵͳ
Mast assembly with dual ball screw drive system
�������ܳɺ�˫����˿��
CIMROC®5000NT controller
CIMROC®5000NT������
Ingersoll Rand 50 HP intensifier pump
Ӣ������50ƥ������ѹ��
Support Structure
֧�Žṹ
The support structure is a steel welded structure which supports the X, Y, and Z axes. The support structure also acts as a housing for the pump to decrease the footprint size of the system and to protect the pump from the water and abrasive.
֧�Žṹ��һ�� �ֺ��ӽṹ ����֧��X��Y����Z�ᡣ֧�Žṹ ͬʱҲ�Ǹ�ѹ�õ� �������Լ���ϵͳ�����γߴ磬������ѹ�� ���ܵ�ˮ��ĥ�ϵ���ʴ��
Cantilever Arm
����
The cantilever arm is completely retractable to remove the arm from the work envelope allowing full access to the cutting table. The X and Y axes of the cantilever arm are driven by servo motors. The Z axis is driven by an electric motor. Each of the axes are driven by dual ball screws.
���ۿ���ȫ�Ӽӹ������ջ� ������ȫ��λ�ӽ�����̨�����۵� X��Y�����ŷ����������Z���ɵ��������ÿ���������������˫����˿������ɡ�
Ingersoll-Rand Pump
Ӣ��������ѹ��
The Vector2® comes standard with 50 HP intensifier pump. The pump uses standard programmable dual pressure control. It has an exclusive long, slow stroke and minimal cooling water requirements.
Vector2® �䱸50ƥ������ѹ�á���ѹ�ñ�ʹ�ñ��ɱ��˫ѹ���ơ��þ��ж��еij���������̺�����������ȴˮ������ص㡣
Please find the following information regarding typical component life for the Ingersoll-Rand Streamline SL-IV Plus Waterjet Intensifier. Please note that this information is based on maximum flow rate (1 gpm) at 55,000 psi. Lower flow rates and/or operating pressures would affect component life in a positive manner. Substandard water quality will have a detrimental effect on component life.
�����ǹ���Ӣ������������SL-IV��ǿ��ˮ�и���ǿ�õĵ��Ͳ���ʹ����������Ϣ����ע�⣬��Щ��Ϣ�ǽ�����ѹ��Ϊ55,000 psiʱ��������Ļ����ϵġ�����ȷ�ķ�ʽ�������ٺ�/ �����ѹ�����ӳ�������ʹ�������������ȼ����ˮ�ʽ��Բ�����ʹ��������������Ӱ�졣
|
Component ���� |
Duty Cycle ʹ������ |
|
Diamond Orifice (for abrasive use) ���ʯ���죨��ĥ��ʹ�ã� |
1,000 hours |
|
Focusing Tube (for abrasive use) �۽��ܣ���ĥ��ʹ�ã� |
80-100 hours |
|
Pneumatic Valves* ���� |
100,000 cycles |
|
High-Pressure Seals ��ѹ�ܷ�� |
300-350 hours |
|
Hydraulic Cartridge Seal Һѹ��Ͳ�ܷ� |
500 hours |
|
High-Pressure Cylinder ��ѹ�� |
3,000 hours |
|
Check Valve* ���� |
500 hours |
|
Ceramic Plunger �մɻ��� |
4,000 hours |
|
Hydraulic Piston* Һѹ���� |
4,000 hours |
|
Seal Head Seals �ܷ�ͷ�ܷ�� |
600 hours |
|
Hydraulic Oil Filter Һѹ������ |
6 months |
|
LP Water Filter ˮ������ |
6 months |
Milling and drilling spindle (
Optional )
ϳ���������� �� ��ѡ��
The spindle is a Perske 5HP 5000 to 18000 RPM programmable. The spindle is located on the mast with the waterjet head and can be manually positioned via pendant control in the Z direction. The system can be either router or water controlled by the operator.
��������Perske���죬����Ϊ5�������ɱ��ת��Ϊ5000��18000ת/���ӡ�������ͬˮ�и�ͷ���Ű�װ����Z���ϣ���ͨ���ֳֿ������ֶ�������Z�����϶�λ����װ����������߿ɿ��ƻ�������ϳ�����Ž���ˮ�и
2.1.4
Special Features
�ص�
High Efficiency Drive
Assemblies
��Ч�����ܳ�
The design of the linear drive assemblies ensures maximum speed and power efficiency, while maintaining quiet operation and excellent repeatability and accuracy. All axes are driven by a high-torque servomotor system through controlled anti-backlash reducers. The gear reducers are sealed units requiring periodic lubricant change.
���������ܳɵ���� ��ȷ���ڱ��ְ�������ǰ���ºͼ��ߵ��ظ���λ���� �붨λ���ȵ������µĸ��ٶȺ߹�Ч��������������ɸ�Ť���ŷ����ϵͳͨ������ ���з����϶�����ļ���������ɡ����ּ������������ܷ�װ���� Ҫ���ڸ�������
Cabling
����
Wiring through the bridge, carriage, and mast axes uses flexible cable track systems. All discrete wires are marked with their numbers in accordance with the elementary diagram.
Electrical cabling to the system consists of multi-conductor cables for the motors, brakes, an feedback encoders. Power and signal cables are UL listed, type CL3 control cables and type TC power cables, with Hypalon jackets. Signal cables incorporate individually twisted, shielded pairs, with extra-flexible stranding for sensitive feedback circuits. Connectors on the system are heavy duty MS-type. Overall, shields and EMI style metal connectors used on system power and signal cables reduce electromagnetic interference (EMI), emissions, and susceptibility.
��ͨ���ţ��а��������ĵ��²��߲��ÿ������ĵ�������ϵͳ�����з����ĵ��߾��� ����һ���͵� ��ԭ��ͼ ��һ�µ��ߺ� �����ӵ�ϵͳ�Ķ�о���°���������ƶ����ͷ����������ĵ� �¡��� UL���� �г� �˵�Դ�ߺ� �ź��ߵ��ͺţ����Ƶ�����CL3�ͣ���Դ���� ��TC�ͣ����Ҷ�����Hypalon���ס��źŵ� �����ź��߽ʺϣ�����˫�����Σ� ������������һ �����Ƴɣ��ɴ������еķ�����·�źš�ϵͳ�ϵĽ��߲�ͷ�� ����MS�͡���֮������ϵͳ�ĵ�Դ���źŵ����ϵ����κ�EMI�ν�����ͷ�ɼ��ٵ�Ÿ��ţ��ź�˥�����Ż���
1.1.1
High Accuracy Package
The MR125 can be provided with a high accuracy
package for precise material removal applications. The accuracy is achieved by the addition of anti- backlash
gearing and using PaR��s Mechanical Error Compensation (MEC) software.
Split Gear
Rack and Pinion Drive System
In order to achieve precision positioning, a split
gear, rack and pinion drive system is used. This system effectively eliminates
backlash by using two pinions �C one to drive the axis and one to pre-load the
axis. Eliminating the system
backlash provides accurate axis positioning during the transition period
between acceleration or steady-state and deceleration, when the load reverses
direction. The mechanical pre-load is achieved using a torsion spring to load
one fixed pinion against the other spring-loaded pinion. To ensure no backlash develops, the
pre-load torque is set higher than the deceleration torque. The preloaded system consists of the
gear rack, spilt pinions, and one reducer/motor drive system.
2.1.5
Reliability
�ɿ���
PaR robotic systems achieve high reliability through a number of design factors including the following:
���������� �����ص����� ��PaR��˾�Ļ�����ϵͳ���Դﵽ�ܸߵĿɿ��ԣ���Щ���ذ�����
4 generations of robots and controllers since 1980 (20 years) with over 1000 systems fielded in similar applications
��1980�꣨20��ǰ���� ����4�������˺Ϳ����� ������1000��ϵͳ����ʹ�á�
Identification of all weak components and redesign or replacement with larger, more rugged units
�������������м��� ���ҽ���������ƻ����� �ϴ�ĸ���̵IJ���������
Implementation of controller part-count reduction program that has reduced controller component count by 66% since 1981 dramatically improving reliability
��1981��������ʵʩ�˿�����������ټƻ� ��ʹ���������������������66%������������˿ɿ��ԡ�
2-hour MTTR on highest controller failure items including power supplies (40,000 MTBF), and motor drives (60,000 MTBF)
���������ϵ�ƽ����ʱ���� ��Ϊ2Сʱ��������Ŀ���� ��Դ��40,000Сʱ��ƽ�����ϼ�����͵��������60,000Сʱ��ƽ�����ϼ��ʱ�䣩��
Recommended system Preventative Maintenance schedule every 1 to 2 months
�Ƽ���ϵͳԤ���Ա����� �ṩÿ1��2���µı����ƻ���
Complete enclosure of brushless motors with 90,000 MTBF from vendor (MTTR is 4 hours)
��ˢ�����ȫ��գ��������ṩ 90,000Сʱ��ƽ�����ϼ����ƽ����ʱ��Ϊ4Сʱ��
Utilization of special test fixtures in-house to flex-life test all new cable assemblies
�������ڲ�����ר�ŵIJ����豸�������µ�����������ƶ�����ʵ�顣
2.1.6
Safety Features
��ȫ����
AlSpindle Runout per NAS 985 - 4.3.10.1
Radial
- 0.0003�� T.I.R.
Axial - 0.0002�� T.I.R.
Cutting
Tests
Overshoot and Undercut Test per NAS 979
4.3.3.4
Accuracy and Repeatability Cutting Test per
NAS 979 4.3.3.11
Position
accuracy is the degree of precision a robot exhibits in an initial attempt to
acquire any target point, as in manufacturing applications. The actual point obtained must be
within a specified tolerance of the target point, regardless of whether the
target point is a taught or an intended point. This specified tolerance can be thought of as the radius of
an imaginary sphere surrounding the target point bulls-eye in three dimensional
space. The sphere represents the
total position accuracy error bandwidth of the robot.
Robot Repeatability (Definition)
Repeatability
is the degree of precision a robot exhibits in returning to a previously
acquired point. The repeated point
must be within a specified tolerance of the previously obtained point. This specified tolerance can be thought
of as the radius of a second imaginary sphere surrounding the previously
obtained point bulls-eye in three dimensional space. The repeatability sphere would be smaller and contained
somewhere within the position accuracy sphere. The second sphere represents the
total repeatability error bandwidth of the robot.
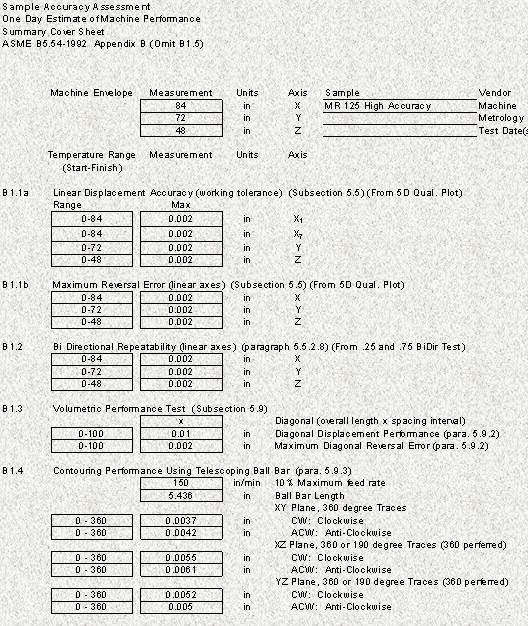
Sample
Accuracy Summary Sheet
The
following table provides a summary of the machine accuracy assessment and
includes displacement accuracy, reversal errors, bi-directional repeatability,
volumetric accuracy, and dynamic contouring accuracy. Please note that no errors or alignment errors of the work
table are included since these errors are not applicable when using the
Renishaw SP2-1 probe and PaR��s probe software to do 6-dimensional transformations.
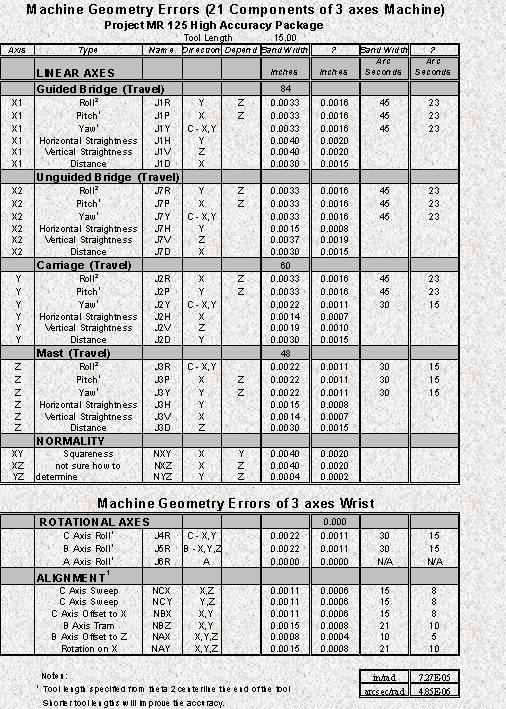
Sample
Accuracy Components Summary
The
following table provides a summary of all the major error components associated
with each axis of motion. It is
important for the end user to be aware of the different components, which make
up the overall accuracy, to be able to make a comparison of vendor��s quoted
accuracy specifications.
All safety devices for human and
machine protection are designed into the locomotion and control system to the
latest OSHA and RIA government and industry standards.
���˶��Ϳ���ϵͳ ������������˺ͻ����İ�ȫ����װ�� ������OSHA��RIV������ҵ����
Programmable boundaries (soft limits) define operational range
�ɱ�̵ļӹ�����߽磨�����ޣ����˻����˵IJ�����Χ��
A hard-wired limit switch (hard limit) halts the system in the event of an axis over-travel due to operator or control system fault
�������Ա����� �����ϵͳ���϶�ʹ ij�����˶������г� ʱ��Ӳ��λ���أ�Ӳ���ޣ���ʹ����ֹͣ��
Shock absorber bumpers (hard stops) absorb impact energy should a catastrophic control failure cause the system to exceed its soft limits and hard limits
һ�����ֻٻ��ԵĹ��� ��ʹ�����˵�������Ӳ����ʧȥ����ʱ�����飨Ӳ��λ�������ճ��������
Low control voltages throughout the electrical system helps safeguard personnel from potential shock hazards caused by equipment damage or human misjudgment
���������˵ĵ���ϵͳ���õ͵�ѹ���ƣ�����������������豸 ����Ϊ�ж�ʧ��������DZ���¹ʡ�
Standard emergency stop (E-STOP) switches on the operator panel and teach pendant provide an emergency shutdown mechanism for halting the system in the event of unanticipated movement. A standard STOP switch on the operator panel provides a routine shutdown mechanism for halting the system
�ڲ����������Ҳ������ϵı���ͣ���� ���ڻ����˳�����Ԥ֪���ƶ�ʱ��ʹ��е���ּ�ͣ���� ��������ϵ�ֹͣ���ؿ�ʹ ��е����ֹͣ�˶��Ӷ�ʹϵͳ��ͣ��
Expandable standard industrial I/O modules provide ample signal and control paths for additional sensing, safety, and control circuits
����չ�ı�I/Oģ�飬�ṩ�˳�����źź� ����ͨ�����Ա����Ӵ���������ȫ���غͿ��ƻ�·��
Motion control system monitors the axes and safely shuts down upon detection of loss of feedback, excessive following error, or excessive motor current. A watchdog timer circuit shuts down the system upon failure of the motion control computer
�˶�����ϵͳ �ɼ�����״̬�����ڶ� ʧ�����ź� �����������������ʱ ʹϵͳ��ȫֹͣ�����˶����� ��������ֹ���ʱ ����� ��ʱ��·��ʹϵͳֹͣ��
Hand held teach pendant for operating the system manually and teaching point data
�ֳֿ����������ֶ�����ϵͳ�� ʾ�̵�λ���ݡ�
2.2 CIMROC®5000NT Controller
CIMROC®5000NT
������
CIMROC®5000NT Controlle
r
The CIMROC®5000NT Controller��s advanced functions allow users to perform complex CNC tasks. The CIMROC® controller provides a complete range of motion control, including multiple coordinate systems, straight-line tool tip motion, time-optimized interpolation, and circular interpolation in absolute, relative, and transformed frames.
CIMROC®5000NT�ṩ���Ƚ��Ĺ������������� ִ�и��ӵ����س����������ṩȫ��Χ���˶����ƣ� ����������ϵͳ������ֱ���˶���ʱ���Ż��岹, �������꼰�������Բ���岹��λ�ñ任��
The CIMROC® is operated utilizing an included application that facilitates editing and execution of Industry Standard RS-274D machine code programs. These programs consist of M and G codes defining the mode and path for complex contouring. The environment is extended to include support for advanced features specific to the application and process peripherals. These often consist of such devices as an automatic end-effector changer, Renishaw probe, or intelligent drill.
�������ڱ༭��ִ�У�������RS-274D��ҵ���Ļ����������ɲ���CIMROC® ����������Щ���� �� ���� ���������ļӹ���ʽ��·���� M��G������ɡ���չ�IJ������������˶��Ƚ����ܵ�֧�ֹ��� ���ر�����Χ�豸��Ӧ�úʹ�������Щ��Χ�豸ͨ���������Զ���������Renishaw��ͷ����������װ�� ��� ��
The CIMROC® features advanced data processing capabilities, analog and digital I/O, and network and serial communications. The open control architecture is based on modular, multi-tiered, distributed processor design. This design enables separate, simultaneous control of supervisory, trajectory, and servo functions. It also provides maximum flexibility in hardware to integrate advanced, real-time motion control options including intelligent interfaces for vision, force-tactile, and surface following.
CIMROC® �����������Ƚ������ݴ����������䱸��ģ������� I/O�ӿڣ�����ʹ���ͨѶ�ӿڡ����������û��� ģ�黯�Ŀ���ʽ�ṹ ���ֲ�ʽ������ ��ơ���������������������ֳ� �������ƴ����� ���켣���ƴ����� ���ŷ����� ���֡���������Ӳ������ϼ�������ԣ��ɰ�װ�Ƚ��Ļ���ѡ����ʵʱ�˶�����ѡ����������ʾ���ӿڣ�ѹ���������ӿںͱ�����ٽӿڡ�
The controller supervisor is a high speed, Pentium single board computer residing on a passive PCI/ISA back plane. It supports standard hardware options such as various graphics display adapters, additional hard disk storage, extended memory, various LAN products, multiple intelligent and non-intelligent serial ports, and other third-party hardware. Sophisticated software packages are available which significantly expand system capabilities including CAD/CAM, local area networks and other host communications, data base management, office applications, and graphics.
���������������� ��һ������ PentiumоƬ����װ��һ����Դ��PCI/ISA�װ��ϡ���֧�ֱ�Ӳ��ѡ�������� ����ͼ����ʾ������ ����չӲ�̣���չ�ڴ� �����������Ʒ����ָ�����ָ�� ���ж˿ڣ��Լ������ĵ�����Ӳ����������������Ч����չϵͳ�ļӹ����� ���������� CAD/CAM�������������� ����������ͨѶ���������ݿ���������� �칫�������ͻ�ͼ ������
2.2.1
Features
�ص�
Multiprocessor-based, distributed architecture
�ദ������ƣ��ֲ�ʽ�ṹ
Standard Microsoft Windows® NT/Windows® 2000 operating system
��Microsoft Windows® NT/Windows® 2000����ϵͳ
Standard CNC Emulation Application (CIMSys) supporting RS-274D part programming
�����ط���Ӧ������(CIMSys)��֧�� RS-274�˿ڳ���
Standard General Purpose Diagnostic and Maintenance Application Program (PaRUtil) enables testing of the CNC machine and motion control system
��ͨ�ù�����Ϻ�ά��Ӧ�ó���(PaRUtil)������������ػ����� �˶�����ϵͳ
Straight line, time optimal, and circular motion types using polynomial contouring algorithms
���ö��������㷨�ɽ���ֱ�ߣ�ʱ���Ż���Բ�����͵��˶���
Absolute and relative point coordinate data
���Ժ���Ե��������ݱ��
Point transformation functions
��λ�� ��ת������
Host communications/LAN support
֧������ͨѶ / ������
Complete digital and analog industrial I/O control
���������ֺ�ģ�� ��ҵ I/O����
Off-line programming
���߱��
Noise free fiber optic communications between computers and CNC machine motor drives
����������� ����������֮�� �������ŵĹ���ͨѶ
2.2.2
Standard Hardware Devices
��Ӳ��װ��
Pentium Supervisory CPU
Pentium���CPU
Pentium Trajectory CPU
Pentium�켣����CPU
Digital Signal Processor (DSP) Motion Control Processor
�����źŴ�������DSP�����˶����ƴ�����
VGA flat panel video display, 10.4 inch TFT, color
VGA��ƽ��ʾ����10.4Ӣ���ɫTFT��ʾ��
Floppy disk storage, 3 1/2 inch, 1.44Mb
3.5 Ӣ�磬1.44Mb����
High capacity hard drive
������Ӳ��
Dynamic RAM memory (Minimum of 32Mb provided)
��̬ RAM�ڴ棨��С����32Mb��
I/O motherboard (8 digital inputs and 8 digital outputs, capable of supporting up to 32 I/O). I/O bus expandable to 512 digital and analog I/O
I/O�壨8λ���룬8λ�����֧��32I/O����I/O���߿���չ�� 512λ���ֺ�ģ�� I/O
QWERTY-style keyboard with numeric keypad, mouse and function keys
�������������ܼ� �ı�����
NEMA-12 grade enclosure with ventilation fans with filters
����NEMA-12���ĵ�����װ�� �����Ⱥ�����
Teach pendant with a 50-foot cord
��50Ӣ�߳����µ� �ֳֿ�����
Dual channel emergency stop and safety stop circuitry
˫ͨ����ͣ���غ� ��ȫ�ضϵ�·
2.2.3
Optional Hardware Devices
��ѡӲ��װ��
Ethernet and RS-232/485 serial communication ports
��̫����RS-232/485����ͨѶ�˿�
Modem
���ƽ����
Thermostatically controlled air conditioning (operating range of 40�� to 125�� Fahrenheit)
���¿յ����ɲ�����Χ��40��50���϶ȣ�

2.2.4
Teach Pendant
�ֳֿ�����
 The teach pendant is a hand held serial terminal used for operating
the system manually and teaching point data. It is connected through a cable to the control console. The teach pendant is equipped with an
emergency stop push-button and three position enabling switches satisfying
ANSI/RIA 15.06-1999. The pendant
has an 8 line by 20-character alphanumeric display, a feed rate control switch,
and a sealed industrial keypad.
The keypad consists of system keys (used to control and modify robot-operating
parameters), function keys, drive keys for operating each axis of the robot,
and application keys.
The teach pendant is a hand held serial terminal used for operating
the system manually and teaching point data. It is connected through a cable to the control console. The teach pendant is equipped with an
emergency stop push-button and three position enabling switches satisfying
ANSI/RIA 15.06-1999. The pendant
has an 8 line by 20-character alphanumeric display, a feed rate control switch,
and a sealed industrial keypad.
The keypad consists of system keys (used to control and modify robot-operating
parameters), function keys, drive keys for operating each axis of the robot,
and application keys.
�ֳֿ����� ��һ���ֳ�ϵ���ն��豸�������ֶ�����ϵͳ�� ʾ�̵�λ���� ��ͨ��һ������ ���ֳֿ����� ���ӵ�����̨���ֳֿ�������װ��һ�� ��ͣ���ذ�Ť����λʹ�ܿ��أ�����ANSI /RIA15.06-1999�����ֳֿ������� �䱸��һ��8��ÿ��26�ַ�����ʾ���� һ�����ʿ��ư�Ť��һ���ܷ�Ĺ�ҵ���� ��������ϵͳ�������ڿ��ƺ��Ļ����˲��������������ܼ� ������������ÿһ�������������Ӧ�ü���ɡ�
2.2.5
Operational Modes
������ʽ
Because of the unstructured nature of many tasks, a variety of control and operational modes are available ranging from manual tele-operation to full robotic control. The CIMROC® can supplement the motion resulting from these operational modes using sensor information to compensate for inaccuracies.
��ΪҪ��� ���ͬ�� ������ʹ �� ��Զ�̿��Ʒ�ʽ��ȫ���ܻ����˿��Ʒ�ʽ �ĸ��ֿ��ƺͲ��� ��ʽ��CIMROC® �ɶ��˶������� ��������Ϊ��Щ������ʽ��ʹ�ô��������� ������Ϣ��
CAD/CAM Off-Line Programming
���߱��
The CIMROC® can process tool paths generated with your existing CAD/CAM system off-line, and can easily be downloaded over your network. Uninterrupted production is maintained by programming parts off-line and queuing jobs to the controller. Additionally, CAD/CAM programming is simplified as the CIMROC® controller automatically adjusts the programmed velocities for tight radii and abrupt contour changes to provide a superior surface finish.
CIMROC® �������� �����Ѵ��ڵ� CAD/CAM����ϵ ͳ ������ �߹켣�������� ������ ���������� �������� �ɱ��� �������� �ij����ҽ����������С� ���ҿ����� �ɼ�CAD/CAM������ �����еļӹ��ٶȣ� �Ա� �ڼӹ� Բ��������ͻ��Ĺ���ʱ �������ߵı��澫�ȡ�
2.2.6
Configuration
����
The standard CIMROC®5000NT incorporates the control computers, system interface circuitry, motor drives, and system I/O in a single enclosure. Modular enclosure design allows the use of matching expansion enclosures to accommodate systems requiring additional space for extended I/O requirements and/or auxiliary equipment. Controller enclosures conform to NEMA-12 standards.
����CIMROC®5000NT������ �ɰ�����ͬһ���������е� ���Ƽ���� ��ϵͳ�ӿڵ�·�������������ϵͳI/O�ӿ���ɡ�ģ�黯�ĵ�������� �ṹ����ʹ����ƥ��ĵ����� ��չ�ռ䣬�Ա� ������չI/O�� / �� ��Χ�豸����Ŀռ䡣���������NEMA-12����
The controller has an electrical disconnect switch with front door interlock, per NFPA 79. Doors of expansion cabinets, when provided, are also interlocked with the disconnect switch. The flat panel video display, keyboard, and emergency stop (E-STOP) pushbutton are located on the front of the controller.
�������� װ��һ����ǰ�� �����ĵ��Ӷ�·���أ������Ҫ ÿһ������ NEPA 79���ĵ�������չ��Ҳ�ɺͶ�·���ػ��� ����ƽ��ʾ�������̺ͼ�ͣ���ذ�Ť��װ�ڿ�������ǰ����
Multiple, guarded, ventilation fans handle cooling of the controller. Air filters are utilized on all air inlets and exhaust openings. Optional air conditioning utilizes CFC free, closed loop systems.
�����ر��� ��դ�Ļ����� ������ȴ������ �����п��������ڶ����п��������� �������Ҫ �ɰ�װ�յ������յ�������CFC���ʣ��ջ����ơ�
2.2.7
Motion Control Subsystem Features
�˶�������ϵͳ���ص�
The motion control subsystem interprets position commands and performs mathematical computations for simultaneous coordination of multiple system axes with controlled
acceleration and velocity. The trajectory processor provides advanced path generation abilities, real-time tool transformations, and complex system kinematics. The digital signal processor executes closed-loop digital servo algorithms. ��Real world�� axis performance is monitored to minimize dynamic positioning errors and to detect and shut down the system in event of fault conditions. High performance pulse width brushless servo drives reduce thermal dissipation in the CIMROC® controller, reducing controller heat generation and saving power.
�˶�������ϵͳ���ڽ���λ�������ϵͳ������������в岹���� �ͼӼ��ٿ��ơ��켣���������ṩ�켣ǰ�� ���ܣ�ʵʱ����ת�����ܺ�ϵͳ�����˶��� ���ƹ��ܡ������źŴ����� ִ�бջ�ȫ�����ŷ��㷨 �������ά �ռ��ڸ����ʵ���˶��Դﵽ��С�Ķ�̬��� ����������ʱ �ֿɹر�ϵͳ��������������ˢ�����ŷ�������С�˿������ķ��ȣ���ʡ�˵��ܡ�
The motion control subsystem also contains a block look-ahead feature. The subsystem computes point density and angular deviation of upcoming points to bound the velocity in order to preserve the geometry defined by the points while striving to maintain the programmed velocity without exceeding the desired acceleration limits. This look-ahead feature results in smoother high-speed contouring and minimized vibration while maximizing processing velocity.
�˶�������ϵͳҲ���� �����ǰ�����ܡ� �����ּӹ��ٶȶ��ֲ��ܳ��� ���ٶȼ���ʱ��Ϊ�˱�֤ �ɵ�λ����ļ��������ľ��ȣ��˶�������ϵͳ�ɼ��㼴���ӹ��ĵ���ܶȺͽǶ�ƫתֵ����ӹ��ٶȡ����ǰ�����ܿ�ʹ���ټӹ�������ƽ���������и��� ����ʱ��ʹ�ﵽ��С����
2.2.8
Encoder
������
Position feedback is obtained using an absolute encoder mounted on the back of each servomotor. The encoder provides commutation, speed, and position information. The absolute encoders eliminate the need for homing on power-up, and have 26 bits of basic resolution, before interpolation, with 16,384 counts per motor revolution and up to 4,096 motor revolutions. They use an Industry Standard interface to provide reliable data transmission over long cable distances. Their SIN/COS type output allows interpolation to obtain very high position resolution (over 16 million counts per motor revolution) for exceptionally smooth motor operation.
λ�÷����ɰ�װ�� ÿ���ŷ� �����ľ��Ա������ṩ �� ���������ṩ�����ٶȺ�λ����Ϣ�����Ա����� ��ȫ������������������Ҫ������������ 26λ�����ֱ��ʣ����ÿת��16,384���������ɷ����ĵ�����ת��Ϊ4,096ת�����������ñ� ��ҵ�ӿڣ����ݿɽ���Զ����ɿ����� ����������������������� ����߷ֱ��ʵ�λ����Ϣ�����ÿת�ɳ���16,000,000�������������ڳ�ƽ���ĵ����

2.2.9
CIMSysÔ
CIMSysÔϵͳ����
![]()
![]()
![]() CIMSysÔ provides CNC control at the CIMROC®
console. It allows users to load,
edit, probe, transform, and execute programs using RS-274D machine tool codes
in a Windows® environment.
Additional capabilities include file management, communication, MDI
(manual data input), selected block execution, tool management,and process
level execution. CIMSysÔ extends RS-274D part programming by using custom miscellaneous or
"M" codes for controlling process equipment.
CIMSysÔ provides CNC control at the CIMROC®
console. It allows users to load,
edit, probe, transform, and execute programs using RS-274D machine tool codes
in a Windows® environment.
Additional capabilities include file management, communication, MDI
(manual data input), selected block execution, tool management,and process
level execution. CIMSysÔ extends RS-274D part programming by using custom miscellaneous or
"M" codes for controlling process equipment.
CIMROC®��������CIMSysÔ �����ṩ ϵͳ�����ؿ��� ������ �û��� Windows® �����£�ʹ�� RS-274D���� ���� ���أ��༭����⣬ת�� ��ִ�г� ���������ӵĹ��ܰ��� �ļ�������ͨ�ţ�MDI���ֶ��������룩��ѡ ��� ִ�У����߹��� �Ͱ��ȼ�ִ�г���Ĺ��� ��CIMSysÔ������չ��RS-274D�˿ڳ� ������ �� ʹ�ø��ָ������ܻ� ��M�� ������� �豸��
CIMSysÔ also supports the ability to use both Metric and English units with the MRÔ125. A user selector switch allows the user to easily move between these two measuring systems.
ͨ����װMRÔ125������CIMSysÔ Ҳ֧�� Ӣ�ƺ��� ���ֲ���ϵͳ ���û�ͨ�� �û�ѡ�� �������������ֲ���ϵͳ֮���л� ��
2.2.10
PaRUtil
PaRUtil����
PaRUtil is an application program that enables technical support personnel to test the CNC machine and motion control system on the CIMROC®5000NT. PaRUtil uses an assortment of window driven menus to perform diagnostics on various elements of the system.
PaRUtil������һ��Ӧ�ó��� ����������֧����Ա ��CIMROC®5000NT.�������ϼ������ ������ �˶��� ��ϵͳ �����������ô��ڷ��� �����˵� ��ϵͳ�ĸ������ֽ�����ϡ�
PaRUtil also assists in the setup of position feedback devices and can display current servo status information. Tests for the following hardware troubleshooting are included:
PaRUtilҲ����λ�÷��� װ�õ����ã�������ʾ ��ǰ�ŷ��� ״̬��Ϣ���������������Ӳ������ ��������
Motion Control Interface
�˶����ƽӿ�
Digital and Serial I/O
���ִ���I/O��
Pendant
�ֳֿ�����
Digital Signal Processor Card
�����źŴ�����
Communication Card and Fiber Optic Link
ͨѶ������
Motor Drive
���������
Feedback Devices (encoders, resolvers, linear scales)
����װ�ã�����������ת��ѹ������դ�ߣ�
Brakes
�ƶ���
Limit Switches and E-Stop Status
��λ���غͼ�ͣ����״̬
3.0
Acceptance Test Package ���ղ��Գ���
PaR, along with the customer, will develop a mutually agreed upon product acceptance test package (ATP). This test package is to demonstrate specification compliance. Customer will approve the ATP before commencing testing. Following system erection, this test procedure will be performed at the installation site facilities. Successful completion of the test cuts and any special customer required tests will constitute final acceptance of the system.
PaR���û�һ���ƶ�˫����ͬ������ղ��Գ������ղ��Գ������֤��������Ƿ���ϡ��ڲ���֮ǰ���û�Ҫ�Ͽ����ղ��Գ�������ϵͳ�İ�װ���ڰ�װ�ֳ���ʼִ�в��Գ����ڳɹ��� ��������к��û��ر�Ҫ��IJ�����Ŀ��Ҫ �����������ո�ϵͳ��
4.0
Installation Plan ��װ�ƻ�
Customer will notify PaR when the system arrives on site and will provide the following:
��ϵͳ���﹤���ֳ� ���û�Ҫ֪ͨPaR��˾�����ṩ�����豸��
One fforklift of 10,000 pound
minimum capacity
һ̨��С������Ϊ10,000���IJ泵
Miscellaneous equipment such as wrenches
�����豸������ֵ�
PaR will provide one field service technician to direct the assembly of the system. Installation supervision covers the placement of the basic robot and controller. PaR will provide one specialist to perform mechanical error compensation and accuracy testing.
PaR����һ������ʦ ָ����װ���̡���װ�����������Ļ����˺Ϳ����� ���ֵİ�װ��PaR,����һ��ר�ҽ��о��Ȳ��� ���Ի�е�����в� ����
5.0
Documentation ����
A complete system document package will be assembled into 3-ring notebooks. This package will include the following.
������ϵͳ���� ������װ�� һ��3�������ϱ��С�������ϰ�������
Mechanical Drawing Package includes copies of all major assemblies listed on the top level System Installation Drawing (SID)
��еͼֽ�������� ������Ҫ����Ļ����� ��װͼ
Electrical Drawing Package includes copies of all electrical schematics and interconnect drawings
����ͼֽ�������� ���е���ͼ���ĸ����� ����ͼ
CIMROC®5000NT Product Manual provides a basic description and operating procedures of the controller
CIMROC®5000NT��Ʒ�ֲᣬ�ṩ�˿������Ļ������� �Ͳ�������
CIMROC®5000NT Service Manual provides trouble shooting guides along with proper serving methods
CIMROC®5000NTά���ֲᣬ�ṩ���ϼ���ָ�� ���ʺϵ�ά����
Vector2® Service Manual includes trouble shooting, servicing, lubrication schedules, and preventative maintenance schedules
Vector2® ά���ֲᣬ�������ϼ��ޣ�ά������ ����ͼ���� Ԥ���Ա���ͼ��
Ingersoll-Rand operation and service manual
Ӣ��������ѹ�ò�����ά���ֲ�
Spare Parts List is a list all PaR recommended parts
�����嵥��������PaR��˾�Ƽ����������
CIMSysÔ Product Manual
CIMSysÔ������Ʒ�ֲ�
PaRUtil Product Manual
PaRUtil������Ʒ�ֲ�
6.0
Training Plan ��ѵ�ƻ�
PaR provides the following training courses. Following the factory tests, training at PaR for customer personnel will begin.
PaR��˾�ṩ������Ҫ��ѵ�γ̡��ڹ�������֮���� PaR��˾�����û���Ա������ѵ��
6.1
Operator Training
������ѵ
This course provides production personnel with the knowledge to operate the system using the product specific operation software for both local and network control. Upon course completion, students will have been instructed on the following:
���γ̽���������Ա����ר�ŵIJ������� ���ƾ������������ϵͳ����֪ʶ������˱��γ�֮��ѧԱ�ɽ��ܵ�����ָ�� ��
System components
ϵͳ����ɽṹ
Basic system operation including power up, program execution, and manual pendant control
ϵͳ�Ļ���������������Դ������ִ�г����ֶ������̵Ŀ���
Basic CIMSysÔ and PaRUtil operation including logons, help screens, error screens, menu selections, editing, file processing, and error recovery
������CIMSysÔ��PaRUtil�����IJ���֪ʶ�������û��Ǽǣ�������Ļ
������ʾ��Ļ���˵�ѡ�༭���ļ��������� �ָ�
System peripheral operation and calibration
ϵͳ��Χ�豸�IJ����ͼ��
Ingersoll-Rand basic intesifier pump system operation
Ӣ��������ѹ�û����IJ���֪ʶ
6.2
Maintenance Training
ά����ѵ
The purpose of this course is to instruct maintenance and/or engineering personnel on theory of operation, basic operation, maintenance and effective troubleshoot of robot, controller, and custom peripheral equipment. This class is 32 hours in duration (4 sessions of 8 hours each).
���γ̵�Ŀ����ָ��ά����ʦ�� / ����Ա�˽� �����Ļ���ԭ����ѧ������IJ�����ά��֪ʶ����Ч�ļ������ˣ��������� �û���Χ�豸�Ĺ��ϡ��ÿγ̹�32ѧʱ��4�죬ÿ��8Сʱ��
Upon course completion, participants will have been instructed on the following:
����˱��γ̣�ѧԱ���߱�����֪ʶ��
The identity and function of all hardware components of the CIMROC® controller
�ɼ��CIMROC® ���������е�Ӳ������
The identity and function of main components on the system
�ɼ��ϵͳ��Ҫ�����Ĺ���
The locations and means whereby all hardware components connect
�˽�����Ӳ��������λ�úͷ�ʽ
How to interpret CNC machine schematic diagrams
ѧ����ο����ػ�����ԭ��ͼֽ
Lubrication requirements including location, frequency, and type of lubricants
�˽�ϵͳ�������λ�ã�Ƶ�ʺ�������
The identity and function of all hardware components on PaR custom peripheral equipment
�ɼ��PaR��˾�ṩ���û�����Χ�豸��Ӳ������
Basic Ingersoll-Rand intensifier pump maintenance
ѧ��Ingersoll-Rand��ѹ�û����ı���֪ʶ
6.3
Software Training
������ѵ
This course covers the operation of standard software modules such as CIMSysÔ and PARUtil. Surfcam training is optional with Surfcam purchase. PaR will train up to four operators. PaR��s facility will host the training course after the system acceptance tests.
���γ̺����� ����CIMSysÔ ��PARUtil �����ȱ�����ģ��IJ���֪ʶ��������ѵ��һ��ѡ���ͨ������ ѡ�����ѵ��PAR��˾һ�ο���ѵ4�������ߡ���ϵͳ����֮����ѵ��PAR�Ĺ������С�
6.4
24-Hour Service Hotline
24Сʱ��������
PaR Systems maintains a 24-hour per day service hotline for the support of equipment supplied by PaR Systems. Our service technicians are trained in the assembly, installation, repair, upgrade, and modification of all equipment we manufacture. Mechanical and software engineers are also available for service calls when necessary. In addition, engineers and service technicians are available to answer telephone questions.
PARϵͳ��˾����24Сʱ�����Զ�PARϵͳ��˾�ṩ���豸����֧�֡����ǵķ���ʦ�����ܹ����������豸�� װ�䣬��װ��ά�ޣ������͵��Ե���ѵ������Ҫʱ����е����ʦ����������ʦҲ���ṩ�����ң�����ʦ�ͷ���ʦͨ���绰ֱ�ӻش��������⡣
7.0 Applicable Codes and Standards���õĴ���ͱ�
The following codes and standards are used in the production of PaR robots and controllers:
PaR��˾�������´���ͱ����ƻ����˺� ������������
Electrical
Standards---Robot Controller
������---�����˿�����
ANSI/NFPA 70, National Electric Code®
ANSI/NFPA 70�����������ҵ�����̡�
ANSI/NFPA 79, Electrical Standard for Industrial Machinery
ANSI/NFPA 79����������ҵ������������
Safety
��ȫ���
ANSI/RIA R15.06, Industrial Robots and Robot Systems �C Safety Requirements
ANSI/RIA R15.06������ҵ�����˺ͻ�����ϵͳ��ȫҪ��
Materials
���ϱ�
ASTM, SAE
Welding
���ӱ�
ASME Section IX Welding or
ANSI / AWS D1.1 Structural Welding Code
ASME��IX���֣����ӣ���ANSI / AWS D1.1���ṹ���ӹ�̡�
Construction
�ṹ��
ANSI/ASMI B15.1 Safety Standard for Mechanical Power Transmission Apparatus
ANSI/ASMI B15.1����е���䰲ȫ����
ANSI/EIA-267-C Axis and Motion Nomenclature for Numerically Controlled Machines
ANSI/EIA-267-C �������豸���ר�����
National Aerospace Standard NAS 938 Machine Axis and Nomenclature
�����Һ��ձ�NAS938��е���ר�����
ASIC Manual of Steel Construction
ASIC���ֽṹ�ֲᡷ
Machine
Accuracy Standards (if applicable)
��е���ȱ����ڿ�Ӧ�õ�����£�
ANSI/ASME B5.54 Methods for Performance Evaluation of Computer Numerically Controlled Machining Centers
���ڵ������ؼӹ����ĵ�ANSI/ASME B5.54����
QA Standards
---PaR��s QAMP-2 meets the following standards
QA��--- PaR��˾��QAMP-2�������б�
ISO 9001/EN29001/ANSI/ASQC Q9001-94, Certificate Number 50673, The Quality Management System is applicable to ��The Designer and Manufacture of Industrial Robots, Manipulators, and Nuclear Handling Equipment��
ISO 9001/EN29001/ANSI/ASQC Q9001-94����֤��50673����������ϵͳ������
����ҵ�����ˣ���е�֣����˴����豸����ƺ����족
7.1
WARRANTY
����
PaR warrants for one (1) year after commencement of the warranty period that all parts manufactured by PaR are free from defects in material and workmanship. The warranty
period shall begin upon the first of the following events to occur (i) the completion of installation; (ii) Buyer acceptance; or (iii) forty-five (45) days after delivery. The warranty will be fulfilled by repair or at the option of PaR, replacement of the defective part and will include the cost of parts and labor. For components, which are purchased by PaR, the original manufacturer��s warranty will be passed onto the Buyer. This warranty is subject to, and the Buyer agrees to the following:
PaR��˾������������������ �� ����ȱ���ṩһ ��ı��ޡ��������¼��� �����ȷ������¼��ķ��������㱣�� �ڣ�( i ) ��װ��� ��( ii )������ϣ���( iii ) ����45��֮������Ҫ���й���ά�ޣ���������������� ������Ѻ���Ա���� ����һЩ ��PaR��˾����������ԭ ���쳧�̵ı����� �����ܡ�Ϊ�˱���ŵ��ʵ�֣�����Ӧ��ѭ����ԭ��
Give PaR written notice of any claimed defect immediately upon discovery.
�ڷ��ֹ��Ϻ�����֪ͨPaR��˾
Provide easy access for PaR to inspect the claimed defective part in the configuration that the defect was discovered; and repair or replace the part.
�û�ӦΪPaR��˾�ļ�����Ա�ṩ���ֳ� ���й����豸�����������Ա��� PaR��˾��ʱ���ֹ������ڣ���ʱ��������� �����
This warranty applies only to the original Buyer.
����������ԭ��
Parts shall not be returned without PaR approval.
û��PaR��˾��ͬ��������ܷ���
All parts replaced shall be the property of PaR.
��������ĸ�����PaR��˾����
No warranty is made with respect to the following:
���в����ڱ���Χ
Parts normally designated as consumables or those subject to normal wear and tear.
һЩ�����ĵĻ���Щ������ĥ��Ͷ��� ���ر�ָ�������
Failures or damage due to accident, abuse, improper operation or abnormal environmental conditions.
�������¼���������ʹ�ã��������IJ�����ʽ�� �쳣�Ļ��� ״����ɵĹ��ϻ���
Systems not installed by PaR or systems installed without PaR supervision, unless the Buyer has PaR��s prior written consent.
ϵͳ������PaR��˾��װ��ϵͳ��װû���ܵ�PaR��˾�ļල������������֮ǰ��PaR��˾������ͬ�⡣